гҖҖгҖҖеј•иЁҖ
гҖҖгҖҖйҡЁи‘—жҲ‘еңӢиҲӘеӨ©дәӢжҘӯ(yГЁ)зҡ„зҷј(fДҒ)еұ�����пјҢй«ҳеҜҶеәҰйӣҶжҲҗйӣ»и·ҜеҷЁд»¶еңЁиҲӘеӨ©еҷЁзҡ„з ”еҲ¶дёӯиў«еӨ§йҮҸдҪҝз”���пјҢ然иҖҢйҡЁи‘—еҷЁд»¶йӣҶжҲҗеәҰзҡ„жҸҗй«ҳе’Ңе·ҘдҪңйӣ»еЈ“зҡ„йҷҚдҪ�����пјҢз©әй–“иј»е°„з’°(huГЎn)еўғе°Қйӣ»еӯҗзі»зөұ(tЗ’ng)зҡ„еҪұйҹҝи¶ҠдҫҶи¶ҠеӨ�?���пјҹиҮ»gиј»е°„з’�(huГЎn)еўғе°Қйӣ»еӯҗзі»зөұ(tЗ’ng)зҡ„жҗҚе®іжңҖдё»иҰҒзҡ„жҳҜе–®зІ’еӯҗж•ҲжҮ�(yД«ng)(Single Event Effect) пјҢе®ғеҖ‘жңғдҪҝеҷЁд»¶еӨұж•ҲжҲ–иҖ…е·ҘдҪңзӢҖж…�(tГ i)зҷ�(fДҒ)з”ҹж”№и®����пјҢеҪұйҹҝйӣ»еӯҗиЁӯ(shГЁ)еӮҷзҡ„еҸҜйқ йҒ�(yГ№n)иЎ� 5���гҖӮеҹәдәҺзӯҶиҖ…жүҖеңЁе–®дҪҚжүҝж“�(dДҒn)зҡ„еӨ§йҮҸиҲӘеӨ©е·ҘзЁӢд»»еӢ�(wГ№)дёӯй—ң(guДҒn)йҚөйғЁдҪҚеқҮдҪҝз”Ёдә� 8051еҫ®жҺ§еҲ¶еҷЁ�����пјҢжң¬ж–Үж №ж“�(jГ№)иҲӘеӨ©йӣ»еӯҗиЁ�(shГЁ)иЁ�(jГ¬)зҡ„иҰҒжұӮе°ҚдёҖж¬�8051IPи»ҹж ёйҖ�(jГ¬n)иЎҢдәҶдҝ®ж”№пјҢд»ҘйҒ©жҮү(yД«ng)иҲӘеӨ©иЁ�(shГЁ)еӮҷзҡ„йңҖиҰ���гҖ�
гҖҖгҖҖ1 mc8051IPж ёд»Ӣзҙ�
гҖҖгҖҖIPпјҲIntellectual Property)еҺҹж„ҸжҢҮзҹҘиӯҳз”ў(chЗҺn)ж¬�(quГЎn)����пјҢеңЁ ICиЁ�(shГЁ)иЁ�(jГ¬)й �(lЗҗng)еҹҹеүҮжҳҜжҢҮй �(yГ№)е…ҲиЁӯ(shГЁ)иЁ�(jГ¬)еҜ�(shГӯ)зҸ�(xiГ n)жҹҗзЁ®еҠҹиғҪзҡ„жЁЎеЎҠгҖӮIPж �(IPжЁЎеЎҠ)еүҮжҳҜжҢҮе®ҢжҲҗжҹҗзЁ®еҠҹиғҪзҡ„иҷӣ擬йӣ»и·ҜжЁЎеЎҠ�����пјҢд№ҹзЁұд№ӢзӮәиҷӣ擬йғЁд»������гҖ�
гҖҖгҖҖж №ж“ҡ(jГ№) IPзҡ„жҸҗдҫӣж–№ејҸйҖҡеёёжҠ� IPж ёеҲҶзӮәзЎ¬ IP(зЎ¬ж ё Hard Core)����гҖҒи»ҹ IP(и»ҹж ё Soft Core)е’Ңеӣә IP(еӣәж ё Firm Core )гҖ�
гҖҖгҖҖзЎ¬ж ёжҳҜйҮқе°ҚжҹҗеҖӢзү№е®ҡе·Ҙи—қзҡ„дёҖеҘ—зү©зҗҶзүҲең�����пјҢйӣ»и·ҜеёғеұҖеёғз·ҡе’Ңе·Ҙи—қжҳҜзўәе®ҡзҡ„пјҢ已經(jД«ng)йҒҺжЁЈе“Ғйӣ»и·Ҝзҡ„й©�(yГ n)иӯ����гҖӮзЎ¬ж ёзҡ„е„�(yЕҚu)й»�(diЗҺn)жҳҜе®ғзҡ„й«ҳйҖҹеәҰе’Ңе®үе…ЁжҖ��пјҢдҪҶз”ұдәҺдҫқиіҙзү№е®ҡзҡ„е·Ҙи—қпјҢжүҖд»Ҙзјәе°‘йқҲжҙ»жҖ����гҖ�
гҖҖгҖҖи»ҹж ёжҳҜ用硬件жҸҸиҝ°иӘһиЁҖ(Verilog HDLжҲ� VHDL)зҡ„еҪўејҸжҸҸиҝ°еҠҹиғҪеЎҠзҡ„иЎҢзӮ����пјҢдҪҶжҳҜ并дёҚж¶үеҸҠз”Ёд»Җд№Ҳйӣ»и·Ҝе’Ңйӣ»и·Ҝе…ғ件еҜ�(shГӯ)зҸ�(xiГ n)йҖҷдәӣиЎҢзӮә���гҖӮи»ҹж ёе…·жңүзҡ„зү№й»һ(diЗҺn)жҳҜеҸҜд»Ҙж №ж“�(jГ№)з”ЁжҲ¶йңҖиҰҒйқҲжҙ»зҡ„йҖ�(jГ¬n)иЎҢдҝ®ж”№е®ҡеҲ��гҖ�
гҖҖгҖҖеӣәж ёжҳҜдёҖзЁ®д»ӢдәҺи»ҹж ёе’ҢзЎ¬ж ёд№Ӣй–“зҡ� IPж ��пјҢйҖҡеёёд»� RTLд»Јзўје’Ңе°ҚжҮ�(yД«ng)е…·й«”е·ҘзЁӢз¶�(wЗҺng)иЎЁзҡ„ж··еҗҲеҪўејҸжҸҗдҫӣгҖӮеӣәж ёжҳҜе®ҢжҲҗдәҶз¶ңеҗҲзҡ„еҠҹиғҪеЎ�����пјҢжңүијғеӨ§зҡ„иЁӯ(shГЁ)иЁ�(jГ¬)ж·ұеәҰпјҢйҖҡеёёд»Ҙз¶І(wЗҺng)иЎЁзҡ„еҪўејҸжҸҗдәӨе®ўжҲ¶��гҖ�
гҖҖгҖҖmc8051IPcoreжҳ� Oreganosystemsе…¬еҸёжҸҗдҫӣзҡ„дёҖеҖӢжҮү(yД«ng)з”Ёе»Јжіӣзҡ„й–Ӣжәҗ 8051IPи»ҹж ё���гҖ�
гҖҖгҖҖе®ғз”ұз®—иЎ“(shГ№)йҒ�(yГ№n)з®—е–®е…������пјҢе®ҡжҷӮеҷЁ /иЁ�(jГ¬)ж•�(shГ№)еҷ���пјҢдёІеҸЈпјҢе…�(nГЁi)йғ� ram��пјҢеӨ–йғ� ramеҸ� romзө„жҲҗ�гҖӮmc8051[_]aluзӮәйҒӢ(yГ№n)з®—е–®е…�����пјҢз”ұеҠ жі•еҷЁпјҢд№ҳжі•еҷ��пјҢйҷӨжі•еҷЁзӯүеҹәжң¬йҒӢ(yГ№n)з®—е–®е…ғзө„жҲҗгҖӮmc8051[_]controlзӮ� mc8051зҡ„жҺ§еҲ¶йҖҡи·Ҝ���гҖӮеҢ…жӢ¬жңүзү№ж®ҠеҜ„еӯҳеҷ�����пјҢиӯҜзўје–®е…�����пјҢеӨҡи·ҜйҒёж“ҮеҷЁпјҢдёӯж–·еҸҠжҢҮд»ӨзӢҖж…�(tГ i)ж©�(jД«)зӯүеҹәжң¬еҠҹиғ������гҖ�2жҠ—е–®зІ’еӯҗеҸҜйқ жҖ§иЁӯ(shГЁ)иЁ�(jГ¬)жҠҖиЎ�(shГ№)
гҖҖгҖҖеҸҜйқ жҖ§иЁӯ(shГЁ)иЁ�(jГ¬)зҡ„еҹәжң¬еҺҹзҗҶжҳҜеҶ—дҪҷ�����пјҢеҢ…жӢ¬дҝЎжҒҜеҶ—дҪҷпјҢжҷӮй–“еҶ—дҪҷзӯ������гҖӮзӣ®еүҚжҠ—е–®зІ’еӯҗж•ҲжҮ�(yД«ng)зҡ„иЁӯ(shГЁ)иЁ�(jГ¬)жҠҖиЎ�(shГ№)дёӯжҮү(yД«ng)з”ЁжңҖе»Јзҡ„жҠҖиЎ�(shГ№)жңүдёүжЁЎеҶ—дҪ�(Triple Modular Redundance ���пјҢTMR),жӘўйҢҜзіҫйҢҜпјҲError Detection And Correction ,EDACпј� 1еҹәдәҺи»ҹ件зҡ„жҺ§еҲ¶жөҒжӘўжё¬
гҖҖгҖҖ2�гҖӮжң¬ж–Үдё»иҰҒйҮҮз”ЁеүҚ2зЁ®еҸҜйқ жҖ§иЁӯ(shГЁ)иЁ�(jГ¬)ж–№жі•���гҖ�
гҖҖгҖҖ2.1 дёүжЁЎеҶ—дҪҷпјҲTMRпјүд»Ӣзҙ�
гҖҖгҖҖдёүжЁЎеҶ—дҪҷжҳҜжҢҮе°Үзӣ®жЁ�(biДҒo)йғЁд»¶еҫ�(fГ№)еҲ¶зӣёжҲҗеҗҢзҡ„дёүеҖӢзӣ®жЁ�(biДҒo)йғЁд»¶дҫҶеҜҰ(shГӯ)зҸ�(xiГ n)дёҖеҖӢзӣ®жЁ�(biДҒo)йғЁд»¶зҡ„еҠҹиғҪпјҢдёүеҖӢзӣ®жЁ�(biДҒo)йғЁд»¶жңҖзөӮе°ҮйҖҡйҒҺдёҖеҖӢеҲӨжұәеҷЁдҫҶеҲӨж–·зӣ®жЁ�(biДҒo)йғЁд»¶зҡ„жӯЈзўәзӢҖж…�(tГ i)����гҖӮе®ғеҲ©з”Ёзҡ„жҳҜзӣёеҗҢдёҖзө„йғЁд»¶еҗҢжҷӮеҮәзҸ�(xiГ n)йҢҜиӘӨжҰӮзҺҮијғе°Ҹзҡ„еҺҹзҗҶдҫҶеҜ�(shГӯ)зҸ�(xiГ n)еҸҜйқ жҖ§зҡ„жҸҗй«ҳгҖ�
гҖҖгҖҖTMRеҸҜз”ЁдәҺеҗ„зЁ®IPиЁ�(shГЁ)иЁ�(jГ¬)зҡ„еҗ„йҡҺж®ө����пјҢж—ўеҸҜд»ҘеңЁзі»зө�(tЗ’ng)зҙҡйҖ�(jГ¬n)иЎҢеҶ—дҪҷпјҢд№ҹеҸҜд»ҘжҳҜеұҖйғЁеҶ—дҪ������гҖ�
гҖҖгҖҖ2.2 зіҫйҢҜжӘўйҢҜпјҲEDACпј�
гҖҖгҖҖ2.2.1 EDACжҰӮиҝ°
гҖҖгҖҖEDACеҸҜд»Ҙз”ЁдҫҶжӘўжё¬йӣ»еӯҗиЁ�(shГЁ)еӮҷдёӯз”ұSEUеј•иө·зҡ„еӯҳе„ІзӮәзҝ»иҪү(zhuЗҺn)йҢҜиӘӨгҖӮEDACзҡ„еҹәжң¬зөҗ(jiГ©)ж§�(gГІu)еҢ…жӢ¬3еҖӢйғЁеҲҶпјҡз·ЁзўјжЁЎеЎҠ�пјҢи§ЈзўјжЁЎеЎҠпјҢеӯҳе„ІжЁЎеЎҠ���гҖӮе…¶дёӯEDACз·ЁзўјжЁЎеЎҠе°ҮйңҖиҰҒиҷ•зҗҶзҡ„ж•�(shГ№)ж“�(jГ№)йҖ�(jГ¬n)иЎҢзӣёй—�(guДҒn)з®—жі•зҡ„з·Ёзў�����пјҢз”ў(chЗҺn)з”ҹж Ўй©�(yГ n)зў������пјҢиҲҮеҫ…иҷ•зҗҶж•ё(shГ№)ж“�(jГ№)дёҖеҗҢеӯҳе…Ҙеӯҳе„ІжЁЎеЎ��гҖӮж•ё(shГ№)ж“�(jГ№)йңҖиҰҒи®ҖеҮәзҡ„жҷӮеҖҷпјҢEDACи§ЈзўјжЁЎеЎҠе°Үж•ё(shГ№)ж“�(jГ№)иҲҮзӣёжҮ�(yД«ng)ж Ўй©—(yГ n)зўјйҖ�(jГ¬n)иЎҢи§Јзўјиҷ•зҗ����пјҢеҫ—еҮәжӯЈзўәзөҗ(jiГ©)ж§�(gГІu)�гҖӮз·ЁзўјиҲҮи§ЈзўјжүҖйҮҮз”Ёзҡ„з·Ёзўјж–№ејҸеҸҜд»Ҙж №ж“�(jГ№)йңҖиҰҒйҒёж“������пјҢеҰӮжјўжҳҺзў�����пјҢеҘҮж¬�(quГЎn)зў���пјҢи—ӨеҺҹиӢұдәҢзўјзӯүзӯү����гҖ�
гҖҖгҖҖ2.2.2 жјўжҳҺзўјд»Ӣзҙ�
гҖҖгҖҖдёӢйқўд»Ҙж“ҙ(kuГІ)еұ�?jiГ©)hжҳҺзўјзӮәдҫӢиӘӘжҳҺз·ЁзўјзіҫйҢҜжӘўйҢҜзҡ„еҺҹзҗ����гҖ� ж“�(kuГІ)еұ�?jiГ©)hжҳҺзўјпјҲExtended Hamming CodeпјүеңЁеӯҳе„Ізі»зөұ(tЗ’ng)зҡ„зіҫйҢҜжӘўйҢҜдёӯеҫ—еҲ°дәҶе»ЈжіӣжҮү(yД«ng)з”���гҖӮд»–зҡ„жңҖе°Ҹзўји·қжҳҜ4�пјҢе°ҚдәҺж•ё(shГ№)ж“�(jГ№)дҪҚж•ё(shГ№) k�пјҢж Ўй©�(yГ n)дҪҚж•ё(shГ№) rпјҢд»–еҖ‘д№Ӣй–“зҡ„й—�(guДҒn)зі»йңҖж»ҝи¶і 2r-1 вү� k+r��гҖӮеҰӮжһңж•ё(shГ№)ж“�(jГ№)дҪ� kеўһеҠ дёҖеҖ�����пјҢж Ўй©�(yГ n)дҪ� rд№ҹеҸӘйңҖиҰҒеўһеҠ�1дҪ������пјҢжүҖд»Ҙе®ғе…·жңүзӣёз•¶(dДҒng)й«ҳзҡ„з·Ёзўјж•ҲзҺҮ��гҖ� 8дҪҚж•ё(shГ№)ж“�(jГ№)з¶�(jД«ng)йҒ�4дҪҚз·ЁзўјеҗҺзҡ„ж•ё(shГ№)ж“�(jГ№)зө�(jiГ©)ж§�(gГІu)еҰӮдёӢпј�
гҖҖгҖҖC= [D7D6D5D4D3D2D1D0C3C2C1C0]е…¶дёӯ D7пҪһD0жҳҜж•ё(shГ№)ж“�(jГ№)дҪ����пјҢC3пҪһC0жҳҜж Ўй©�(yГ n)дҪҚпјҡ
гҖҖгҖҖC3= D7 вҠ•D6 вҠ� D5 вҠ� D4 ��пј� C2= D7 вҠ•D3 вҠ� D2 вҠ� D1����пј� C1= D6 вҠ•D5 вҠ� D3 вҠ� D2 вҠ� D0 пј� C0= D6 вҠ•D4 вҠ� D3 вҠ� D1вҠ� D0
гҖҖгҖҖи§ЈзўјжҷӮйңҖиЁ�(jГ¬)з®—еӯҳе„Іж•ё(shГ№)ж“�(jГ№)зҡ„дјҙйҡЁеҗ‘йҮ� S: S3= C3 вҠ•CB3����пјӣS2= C2 вҠ•CB2 пјӣS1= C1вҠ•CB1����пјӣS0= C0 вҠ•CB0 е…¶дёӯ CB0пјҢCB1,CB2,CB3зӮ� 8дҪҚж•ё(shГ№)ж“�(jГ№)еңЁи§ЈзўјжҷӮеҲ»зҡ„ж Ўй©—(yГ n)дҪ�����гҖӮж №ж“�(jГ№)з®—еҫ—зҡ„дјҙйҡЁеҗ‘йҮ� SжҲ‘еҖ‘е°ұеҸҜд»ҘеҲӨж–·ж•�(shГ№)ж“�(jГ№)дҪҚжҳҜеҗҰзҷј(fДҒ)з”ҹйҢҜиӘӨеҸҠйҢҜиӘӨзҷ�(fДҒ)з”ҹзҡ„дҪҚзҪ®гҖ�
гҖҖгҖҖ2.3 е…©зЁ®зіҫйҢҜж–№жі•зҡ„жҜ”иј�
гҖҖгҖҖTMRиҲ� EDACйғҪеұ¬дәҺ硬件еҶ—дҪ������пјҢе°ҚдәҺдёҚеҗҢеӯ—й•·зҡ„еӯҳе„Іеҷ����пјҢд»–еҖ‘жүҖеҚ з”Ёзҡ„йқўз©Қй–ӢйҠ·е’ҢжҷӮй–“й–ӢйҠ·жҳҜдёҚеҗҢзҡ„�����гҖӮTMRжүҖеҚ з”Ёзҡ„йқўз©Қй–ӢйҠ·еҢ…жӢ¬еҶ—дҪҷзҡ„2еҖӢзӣ®жЁ�(biДҒo)еҷЁд»¶д»ҘеҸҠеҲӨжұәеҷЁеҸҠйҷ„еұ¬йӣ»и·ҜйӮҸијҜ���пјҢEDACжүҖеўһеҠ зҡ„йқўз©Қй–ӢйҠ·еүҮеҢ…жӢ¬дәҶеўһеҠ зҡ„ж Ўй©—(yГ n)дҪ���пјҢз·ЁзўјеҷЁ��пјҢи§ЈзўјеҷЁеҸҠйҷ„еұ¬йӮҸиј� 1�����гҖӮж №ж“�(jГ№)д»ҘдёҠеҲҶжһҗжҲ‘еҖ‘еҸҜд»Ҙеҫ—еҮәзөҗ(jiГ©)и«��пјҢе°ҚдәҺдҝқиӯ�(hГ№)еҜ„еӯҳеҷ��пјҢеҜ„еӯҳеҷЁзө„зӯүе®№йҮҸијғе°Ҹзҡ„еӯҳе„ІеҷЁд»¶пјҢTMRжңүеҜҰ(shГӯ)зҸ�(xiГ n)з°Ўе–®��пјҢеўһеҠ йқўз©Қијғе°‘зҡ„жңүй»һ(diЗҺn)��гҖӮиҖҢе°ҚдәҺеӨ§е®№йҮҸзҡ„еӯҳе„ІеҷЁ����пјҢеүҮжҮ�(yД«ng)з•�(dДҒng)йҮҮз”Ё EDACдҫҶйҖ�(jГ¬n)иЎҢзіҫйҢҜжӘўйҢ��гҖ�
гҖҖгҖҖ3й«ҳеҸҜйқ жҖ� 8051е…·й«”ж–№жЎҲиЁ�(shГЁ)иЁ�(jГ¬)еҸҠеҜҰ(shГӯ)зҸ�(xiГ n)йҖҡйҒҺе°� SEUзҡ„ж©ҹ(jД«)зҗҶеҲҶжһҗеҸҠ mc8051зө�(jiГ©)ж§�(gГІu)еҲҶжһҗеҸҜд»Ҙеҫ—еҮә�����пјҢе®№жҳ“еҸ—еҲ°зІ’еӯҗиј»е°„зҡ„й—�(guДҒn)йҚөйғЁдҪҚжңү
гҖҖгҖҖ3пјҡзү№ж®ҠеҜ„еӯҳеҷЁпјҲSpecial Function Register �пјҢSFRпј����пјҢе…§(nГЁi)йғ� ram���пјҢеӨ–йғ� ramгҖӮжң¬и«–ж–Үе°ұдёҠиҝ°дёүеҖӢжЁЎеЎҠе°Қ mc8051IPж ёйҖ�(jГ¬n)иЎҢдәҶи©ІйҖ�(jГ¬n)����гҖ�
гҖҖгҖҖ3.1зү№ж®ҠеҜ„еӯҳеҷЁпјҲSFRпј�
гҖҖгҖҖmc8051IPж ёзҡ„зү№ж®ҠеҜ„еӯҳеҷ�(SFR)еқҮеңЁ control[_]memж–Ү件дёӯеҜҰ(shГӯ)зҸ�(xiГ n)гҖӮи©ІжЁЎеЎҠеҜ�(shГӯ)зҸ�(xiГ n) 8051иӯҜзўјеҠҹиғҪ��гҖӮSFRеӯ—зҜҖ(jiГ©)ең°еқҖиҢғеңҚжҳ�80H-FFH�пјҢд»–еҖ‘еңЁ RAMдёӯ并дёҚжҳҜе®Ңе…ЁйҖЈзәҢ(xГ№)зҡ„пјҢ21еҖ� SFRйӣўж•Јзҡ„еҲҶеёғеңЁдёҠиҝ°еӯ—зҜҖ(jiГ©)еҚҖ(qЕ«)еҹҹзҡ„128еҖӢеӯ—зҜҖ(jiГ©)е–®е…ғдё���гҖӮеңЁmc8051IPж ёдёӯ并沒用е°ҮйҖҷдәӣSFRиЁ�(shГЁ)иЁ�(jГ¬)еңЁе…§(nГЁi)йғ� ramдё����пјҢиҖҢжҳҜе°ҚжҮү(yД«ng)ең°еқҖеҲҶеҲҘеҜ�(shГӯ)зҸ�(xiГ n)зҡ���гҖӮе°Қ SFRзҡ„еҠ еӣәиҷ•зҗҶжҳҜйҮҮз”Ёдә� TMRжҠҖиЎ�(shГ№)�����гҖӮе…·й«”еҜҰ(shГӯ)зҸ�(xiГ n)жӯҘй©ҹеҰӮдёӢпј�
гҖҖгҖҖз¶ңеҗҲеҗҺзөҗ(jiГ©)жһңжҲӘеҸ–еҰӮдёӢең–пј�

гҖҖгҖҖ3.2е…�(nГЁi)йғ� RAM
гҖҖгҖҖи©� IPж ёеҸҜж”ҜжҢҒ 128еӯ—зҜҖ(jiГ©)е…�(nГЁi)йғЁRAM.з”� 2.3еҲҶжһҗ�����пјҢж–№жЎҲйҮҮз”� TMRж–№ејҸе°Қе…§(nГЁi)йғ� RAMйҖ�(jГ¬n)иЎҢиҷ•зҗ������пјҢйҒёз”� 3еҖӢзӣёеҗҢзҡ„ 128еӯ—зҜҖ(jiГ©)зҡ� RAMдҪңзӮәеҶ—дҪҷзҡ„еӯҳе„ІеҷЁ���пјҢз”ұ mc8051[_]ram[_]fsmиҲ� mc8051[_]ram[_]dataflowе…©еҖӢжЁЎеЎҠзө„жҲҗдәҶе…�(nГЁi)йғ� RAMзҡ„ж•ё(shГ№)ж“�(jГ№)йҖҡи·Ҝ�����пјҢе…¶дёӯеүҚиҖ…е®ҢжҲҗеҜ«е„�(yЕҚu)е…Ҳзҡ„и®ҖеҜ«зӢҖж…�(tГ i)жҺ§еҲ¶��пјҢеҗҺиҖ…е®ҢжҲҗж•ё(shГ№)ж“�(jГ№)жөҒеҗ‘жҺ§еҲ¶��гҖӮж•ё(shГ№)ж“�(jГ№)йҖҡи·ҜиІ�(fГ№)иІ�(zГ©)е®ҢжҲҗж•�(shГ№)ж“�(jГ№)ж Ўй©—(yГ n)����?���пјҹеҲӮд»ҶоҹҠж”ҫcж•�(shГ№)ж“�(jГ№)йҖҡи·Ҝзө„жҲҗе…�(nГЁi)йғ� RAMжҺҘеҸЈйӮҸијҜгҖӮ經(jД«ng)йҒҺд»ҝзңҹеҗҺе…�(nГЁi)йғ� RAMжҺҘеҸЈзө�(jiГ©)ж§�(gГІu)жЎҶең–еҸҠи®ҖеҜ«жҷӮеәҸеҰӮдёӢпјҡ
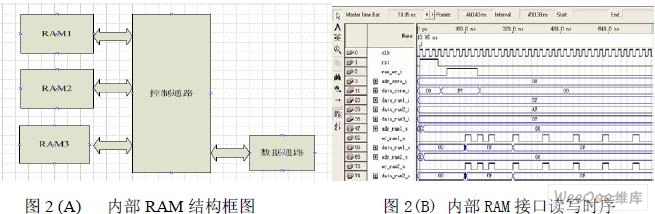
гҖҖгҖҖең� 2(B)еҸҜзңӢеҮәпјҡеҜ«ж•ё(shГ№)ж“�(jГ№)жҷ��пјҢж•ё(shГ№)ж“�(jГ№)ијёе…ҘеҗҺ第дәҢеҖӢе‘Ёжңҹиў«еҜ«е…ҘRAMпјӣи®Җж•�(shГ№)ж“�(jГ№)жҷ������пјҢи®ҖжҢҮд»Өиў«жӘўжё¬еҲ°еҗҺзҡ„з¬� 5еҖӢе‘Ёжңҹ經(jД«ng)ж Ўй©—(yГ n)еҗҺзҡ„жӯЈзўәж•�(shГ№)ж“�(jГ№)иў«ијёеҮә并且被еӣһеҜ«зөҰRAM����гҖӮеңЁжҺҘе…Ҙе·ҘзЁӢжҮ�(yД«ng)з”ЁжҷӮйңҖе°ҮеӨ–йғЁжҷӮйҗҳйҖ�(jГ¬n)иЎ� 6еҖҚй »д»Ҙй…Қеҗ� cpuи®ҖеҜ«жҷӮеәҸгҖ�
гҖҖгҖҖ3.3 еӨ–йғЁ RAM
гҖҖгҖҖеӨ–йғЁ RAMеҸҜд»Ҙж”ҜжҢҒ64K��пјҢеҗҢжЁЈз”ұ 2.3еҲҶжһҗ�пјҢж–№жЎҲйҒёеҸ–иғҪзі� 1дҪҚйҢҜжӘ� 2дҪҚйҢҜзҡ„ж“ҙ(kuГІ)еұ�?jiГ©)hжҳҺзўјйҖ�(jГ¬n)иЎ� EDACиҷ•зҗҶгҖӮе…¶дё���пјҢж•ё(shГ№)ж“�(jГ№)иҷ•зҗҶе–®е…ғе®ҢжҲҗж•�(shГ№)ж“�(jГ№)зҡ„з·Ёзў������пјҢи§Јзў��пјҢең°еқҖйҺ–еӯҳеҸҠж•ё(shГ№)ж“�(jГ№)ијёеҮәеҠҹиғҪ���гҖӮи®ҖеҜ«зӢҖж…�(tГ i)ж©�(jД«) FSMе®ҢжҲҗеӨ–йғЁ RAMзҡ„и®ҖеҜ«зӢҖж…�(tГ i)жҺ§еҲ¶пјҢеҗҢжЁ������пјҢзӮәй…ҚеҗҲ ramзҡ� IPи»ҹж ёжҷӮеәҸ�����пјҢжҲ‘еҖ‘е°Ү FSMиЁ�(shГЁ)иЁ�(jГ¬)зӮәеҜ«е„�(yЕҚu)е…�����гҖӮд»ҝзңҹеҗҺзҡ� EDACзө�(jiГ©)ж§�(gГІu)жЎҶең–еҸҠи®ҖеҜ«жҷӮеәҸеҰӮдёӢпјҡ
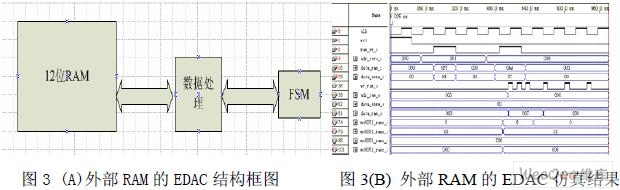
гҖҖгҖҖйңҖиҰҒжҢҮжҳҺзҡ„жҷӮдёҠең–д»ҝзңҹжҷӮеӨ–йғЁжҷӮйҗҳзӮ� 10Mhz,з¶�(jД«ng)йҒ� alteraе…¬еҸё alt[_]PLLйҖ�(jГ¬n)иЎҢдәҶ 6еҖҚй »еҸҠзӣёдҪҚиӘҝ(diГ o)ж•ҙпјҢеүҚдёҖеҖӢеҜ«жҢҮд»ӨжңӘиў«еҹ�(zhГӯ)иЎҢзҡ„еҺҹеӣ жҳ� PLLйңҖиҰ� 2еҲ� 3еҖӢжҷӮйҗҳе‘Ёжңҹзҡ„иӘ�(diГ o)ж•ҙз©©(wДӣn)е®ҡй »зҺҮијёеҮ����гҖ� EDACжЁЎеЎҠзҡ„и®ҖеҜ«жҷӮеәҸиҲҮе…�(nГЁi)йғ� RAMзӣёдјј����пјҢеҜ«ж•�(shГ№)ж“�(jГ№)жҷӮ第 2еҖӢжҷӮйҗҳе‘Ёжңҹ經(jД«ng)йҒҺиҷ•зҗҶеҗҺзҡ� 8дҪҚеҺҹж•�(shГ№)ж“�(jГ№)д»ҘеҸҠ 4дҪҚж Ўй©�(yГ n)ж•�(shГ№)ж“�(jГ№)дёҖеҗҢиў«еҜ«йҖ�(jГ¬n) RAM�пјҢи®Җж•�(shГ№)ж“�(jГ№)жҷӮпјҢи®ҖеҮәзҡ„ 12дҪҚж•ё(shГ№)ж“�(jГ№)з¶�(jД«ng)йҒҺи§ЈзўјзіҫжӯЈеҗҺеңЁз¬¬ 5еҖӢжҷӮйҗҳе‘ЁжңҹијёеҮ� 8дҪҚж•ё(shГ№)ж“�(jГ№)并е°ҮзіҫжӯЈеҗҺзҡ„ 12дҪҚж•ё(shГ№)ж“�(jГ№)еӣһеҜ«йҖ�(jГ¬n) RAM�����пјҢд»ҘйҳІжӯў SEEзҡ„з©ҚзҙҜгҖӮз”ұжҷӮеәҸең–еҸҜзҹҘд»ҘдёҠиЁӯ(shГЁ)иЁ�(jГ¬)е®Ңе…Ёз¬ҰеҗҲиЁ�(shГЁ)иЁ�(jГ¬)иҰҒжұӮ�гҖ�
гҖҖгҖҖ3.4е…Ёзі»зө�(tЗ’ng)д»ҝзңҹ
гҖҖгҖҖеңЁе®ҢжҲҗдёҠиҝ°е№ҫеҖӢж–№йқўзҡ„ IPе®ҡдҝ®ж”№д№ӢеҗҺпјҢе°� mc8051зҡ„й ӮеұӨзі»зө�(tЗ’ng)йҖ�(jГ¬n)иЎҢдәҶ modelsimзҡ„з¶ңеҗҲеүҚд»ҝзңҹ�����пјҢд»ҝзңҹйғЁеҲҶзөҗ(jiГ©)жһңеҰӮдёӢпјҡ
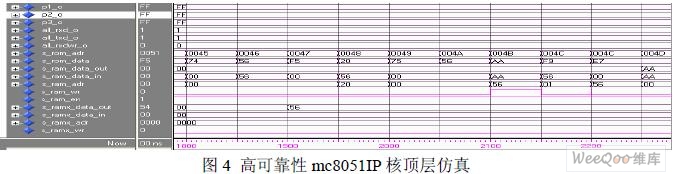
гҖҖгҖҖд»ҝзңҹжҷӮе°Ү ROMзҡ„еҲқе§ӢеҢ–ж–Ү件иЁ�(shГЁ)зҪ®зӮә mc8051ж–ҮжӘ”дёӯзҡ„ tc1.hex����пјҢж–№дҫҝиҲҮеҺ� IPж ёйҖ�(jГ¬n)иЎҢе°Қз…����гҖӮзӮәең� modelsimд»ҝзңҹеү�����пјҢжҲ‘еҖ‘е·Іе°� alteraзҡ� altera[_]mfеә«еҠ е…ҘеҲ° modelsimеә«ж–Ү件дёӯ��гҖӮеңЁйҖ�(jГ¬n)иЎҢеҠҹиғҪд»ҝзңҹзҡ„жҷӮеҖҷиӘҝ(diГ o)з”ЁдәҶе…¶дёӯзҡ� alt[_]pllдҫҶйҖ�(jГ¬n)иЎҢжҷӮйҗҳиҷ•зҗ�����гҖӮеңЁдҪҝз”Ёи©� IPж ёжҷӮеҸҜд»Ҙж №ж“ҡ(jГ№)е…·й«”йҮҮз”Ёзҡ„еҷЁд»¶дҫҶе®ҢжҲҗеҖҚй »зҡ„еҠҹиғҪгҖӮд»ҘдёҠжҷӮеәҸе®Ңе…ЁжӯЈзў�����пјҢиӘӘжҳҺдҝ®ж”№еҗҺзҡ� IPж ёиҲҮеҺ� IPж ёеҠҹиғҪдёҠзӯүеҗҢ����гҖ�
гҖҖгҖҖ4зө�(jiГ©)и«�
гҖҖгҖҖжң¬ж–ҮеңЁoreganosystemsе…¬еҸёжҸҗдҫӣзҡ„й–Ӣжәҗmc8051IPи»ҹж ёзҡ„еҹәзӨ�(chЗ”)дёҠж №ж“�(jГ№)й«ҳеҸҜйқ жҖ§иҲӘеӨ©йӣ»еӯҗиЁӯ(shГЁ)иЁ�(jГ¬)зҡ„ж–№жі•дҝ®ж”№дәҶйғЁеҲҶжЁЎеЎҠ�����пјҢеҜҰ(shГӯ)иёҗиӯүжҳҺдҝ®ж”№еҗҺзҡ„еҠҹиғҪиҲҮеҺ� mc8051IPж ёе®Ңе…Ёзӣёеҗ�����пјҢйҒ”(dГЎ)еҲ°иЁӯ(shГЁ)иЁ�(jГ¬)зӣ®зҡ„?���пјҹжўўж„ҝ鶕?jГ№)йңҖиҰҒе°Ү IPж ёз¶ңеҗҲеҗҺз”ҹжҲҗзҡ„з¶І(wЗҺng)иЎЁж–Ү件дёӢијүйҖ�(jГ¬n)зҸ�(xiГ n)е ҙеҸҜз·ЁзЁӢйӮҸијҜеҷЁд»¶пј� FPGAпјүжҲ–иҖ…йҖ�(jГ¬n)иЎҢжөҒзүҮиЁӯ(shГЁ)иЁ�(jГ¬)жҲ� ASICпјҢе…·еӮҷиҲӘеӨ©дҪҝз”Ёеғ№еҖ��гҖӮжң¬ж–Үеүө(chuГ ng)ж–°й»һ(diЗҺn)пјҡжң¬ж–Үж №ж“�(jГ№)еңЁз ”иҲӘеӨ©й �(xiГ ng)зӣ®йңҖиҰҒпјҢе®ҡеҲ¶дәҶдёҖзЁ®еҸҜйҒ©жҮү(yД«ng)иҲӘеӨ©е·ҘдҪңз’�(huГЎn)еўғзҡ„еҫ®жҺ§еҲ¶еҷЁ IPж ��гҖӮйҮҮз”Ёеёёз”Ёзҡ„е®№йҢҜжҠҖиЎ�(shГ№)е°Қжҷ®йҖҡе•Ҷз”� IPж ёйҖ�(jГ¬n)иЎҢдәҶеҠ еӣәгҖӮи©І IPж ёзҡ„жҲҗеҠҹж”№йҖ��пјҢеҸҜд»ҘдёҖе®ҡзЁӢеәҰдёҠжёӣиј•жҲ‘еңӢи»Қе“ҒзҙҡиҠҜзүҮе°ҚеңӢеӨ–зҡ„дҫқиіҙпјҢжҸҗй«ҳдәҶж•ҲзҺ����пјҢзӮәеҗҺзәҢ(xГ№)зҡ„з ”з©¶з©ҚзҙҜдәҶеҜ¶иІҙз¶�(jД«ng)й©�(yГ n)��гҖ�