гҖҖгҖҖдёҖ�����гҖҒжӯҘйҖ�(jГ¬n)йӣ»ж©ҹ(jД«)й–үз’°(huГЎn)жҺ§еҲ¶зі»зөұ(tЗ’ng)
гҖҖгҖҖй–�(kДҒi)з’�(huГЎn)жҺ§еҲ¶жӯҘйҖ�(jГ¬n)йӣ»ж©ҹ(jД«)й©�(qЕ«)еӢ�(dГІng)зі»зөұ(tЗ’ng)зҡ„ијёе…Ҙи„ҲжІ–дёҚдҫқиіҙдәҺиҪү(zhuЗҺn)еӯҗзҡ„дҪҚзҪ®��пјҢиҖҢдәӢе…ҲжҢүз…§дёҖе®ҡиҰҸ(guД«)еҫӢзөҰе®�����гҖӮзјәй»�(diЗҺn)жҳҜйӣ»ж©�(jД«)ијёеҮәиҪ�(zhuЗҺn)зҹ©еҠ йҖҹеәҰеңЁеҫҲеӨ§зЁӢеәҰдёҠеҸ–жұәдәҺй©…(qЕ«)еӢ�(dГІng)жәҗе’ҢжҺ§еҲ¶ж–№ејҸгҖӮе°Қ(duГ¬)дёҚеҗҢйӣ»ж©ҹ(jД«)жҲ–еҗҢзЁ®йӣ»ж©�(jД«)иҖҢдёҚеҗҢзҡ„иІ�(fГ№)иј������пјҢеҫҲйӣЈжүҫеҲ°йҖҡз”Ёзҡ„еҠ жёӣйҖҹиҰҸ(guД«)еҫ���пјҢеӣ жӯ����пјҢжҸҗй«ҳжӯҘйҖ�(jГ¬n)йӣ»ж©ҹ(jД«)зҡ„жҖ§иғҪжҢҮжЁҷ(biДҒo)еҸ—еҲ°йҷҗеҲ¶��гҖ�
гҖҖгҖҖй–үз’°(huГЎn)жҺ§еҲ¶жҳҜзӣҙжҺҘжҲ–й–“жҺҘең°жӘўжё�(cГЁ)иҪ�(zhuЗҺn)еӯҗзҡ„дҪҚзҪ®е’ҢйҖҹеәҰ�пјҢ并йҖҡйҒҺ(guГІ)еҸҚйҘӢе’ҢйҒ©з•�(dДҒng)?shГ№)еҘ¶е№ҡ?��пјҢиҮӘ?dГІng)зөҰеҮәй©�(qЕ«)еӢ�(dГІng)зҡ„и„ҲжІ–дёІ����гҖӮз”Ёй–үз’°(huГЎn)жҺ§еҲ¶еҸҜзҚІеҫ—жӣҙеҠ зІҫзўәзҡ„дҪҚзҪ®жҺ§еҲ¶е’Ңијғй«������гҖҒијғе№із©©(wДӣn)зҡ„иҪү(zhuЗҺn)йҖҹпјҢдё”еҸҜеңЁжӯҘйҖ�(jГ¬n)йӣ»ж©ҹ(jД«)зҡ„е…¶е®ғй ҳ(lЗҗng)еҹҹе…§(nГЁi)зҚІеҫ—жӣҙеӨ§зҡ„йҖҡз”ЁжҖ��гҖ�
гҖҖгҖҖжӯҘйҖ�(jГ¬n)йӣ»ж©ҹ(jД«)зҡ„ијёеҮәиҪү(zhuЗҺn)зҹ©жҳҜеӢ�(lГ¬)зЈҒйӣ»жөҒе’ҢеӨұиӘҝ(diГ o)и§’зҡ„еҮҪж•ё(shГ№)гҖӮзӮәзҚІеҫ—й«ҳијёеҮәиҪү(zhuЗҺn)зҹ�����пјҢеҝ…иҖғж…®йӣ»жөҒзҡ„и®ҠеӨ§е’ҢеӨұиӘҝ(diГ o)и§’зҡ„еӨ§е°ҸпјҢйҖҷе°Қ(duГ¬)й–�(kДҒi)з’�(huГЎn)жҺ§еҲ¶еҫҲйӣЈеҜ�(shГӯ)зҸ�(xiГ n)�гҖ�
гҖҖгҖҖжӯҘйҖ�(jГ¬n)йӣ»ж©ҹ(jД«)й–үз’°(huГЎn)жҺ§еҲ¶ж–№жЎҲдё»иҰҒжңүж ёжӯҘжі•гҖҒжҷӮ(shГӯ)間延йҒІжі•�гҖҒз„Ў(wГә)дҪҚзҪ®еӮіж„ҹеҷЁзҡ„й–үз’°(huГЎn)жҺ§еҲ¶зі»зөұ(tЗ’ng)зӯүгҖ�
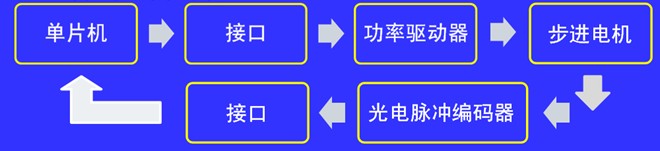
гҖҖгҖҖз”Ёе…үйӣ»и„ҲжІ–з·ЁзўјеҷЁдҪңдҪҚзҪ®жӘўжё�(cГЁ)е…ғ件зҡ„й–үз’�(huГЎn)жҺ§еҲ¶еҺҹзҗҶеҰӮдёӢең���гҖӮе…¶дёӯз·ЁзўјеҷЁзҡ„еҲҶиҫЁзҺҮеҝ…й ҲиҲҮжӯҘйҖ�(jГ¬n)йӣ»ж©ҹ(jД«)жӯҘи·қи§’еҢ№й…������гҖӮз·ЁзўјеҷЁзӣҙжҺҘеҸҚжҳ еҸғж•ё(shГ№)еҲҮжҸӣи§������пјҢдҪҶз·ЁзўјеҷЁзӣёе°�(duГ¬)дәҺйӣ»ж©�(jД«)дҪҚзҪ®еӣәе®ҡ�гҖӮеӣ жӯ����пјҢзҷј(fДҒ)еҮәзӣёеҲҮжҸӣзҡ„дҝЎиҷ�(hГ o)дёҖе®���пјҢеҸӘиғҪжҳҜдёҖзЁ®еӣәе®ҡзҡ„еҲҮжҸӣи§’ж•ё(shГ№)еҖ������гҖӮз”Ёжҷ�(shГӯ)間延йҒІжі•����пјҢеҸҜзҚІдёҚеҗҢзҡ„еҲҮжҸӣи§’пјҢдҪҝйӣ»ж©�(jД«)з”�(chЗҺn)з”ҹдёҚеҗҢзҡ„е№іеқҮиҪ�(zhuЗҺn)зҹ��пјҢеҫ—еҲ°дёҚеҗҢзҡ„иҪ�(zhuЗҺn)йҖҹгҖ�
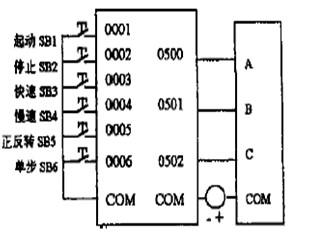
гҖҖгҖҖдә������гҖҒжӯҘйҖ�(jГ¬n)йӣ»ж©ҹ(jД«)зҡ„PLCжҺ§еҲ¶
гҖҖгҖҖPLCдҪңзӮәжҺ§еҲ¶еҷЁе°Қ(duГ¬)ж©�(jД«)еәҠйӣ»ж°ЈжҺ§еҲ¶зі»зө�(tЗ’ng)зҡ„ж”№йҖ и¶Ҡдҫ�(lГЎi)и¶ҠзӘҒеҮ������пјҢе…¶дё»иҰҒйғЁеҲҶжҳҜе°Қ(duГ¬)ж•�(shГ№)жҺ§ж©ҹ(jД«)еәҠзҡ„е…ёеһӢеҹ�(zhГӯ)иЎҢе…ғ件жӯҘйҖ�(jГ¬n)йӣ»ж©ҹ(jД«)зҡ„жҺ§еҲ��гҖӮеҲ©з”ЁPLCжҺ§еҲ¶жӯҘйҖ�(jГ¬n)йӣ»еӢ•(dГІng)ж©�(jД«)пјҢе…¶и„ҲжІ–еҲҶй…ҚеҸҜд»Ҙз”ұи»ҹ件йҖ�(jГ¬n)иЎҢиЁӯ(shГЁ)иЁ�(jГ¬)�����пјҢйӮ„еҸҜд»Ҙз”ұ硬件дҫҶ(lГЎi)зө„жҲҗ���гҖ�